ロボコン足回り大全
ロボコンの足回りについてまとめる
オムニ
概要
ロボコンにおいては、オムニホイールを使用した足回りを指している場合が多い この足回りは一番ポピュラーな足回りで制御が楽なため、採用される場合が多い 海外ではH状に配置する奴と区別するために、ホロノミックドライブ (Holonomic Drive) と呼ばれることもある この茶色いやつは、フリー回転するタイヤであり、図の赤矢印の方向に滑るということである 図のように二枚のオムニホイールで一輪が構成される
| オムニ | 動くオムニ |
|---|---|
youtubeより |
これはフリー回転するバレルによって、タイヤの回転方向にのみ力が作用するためである
具体例
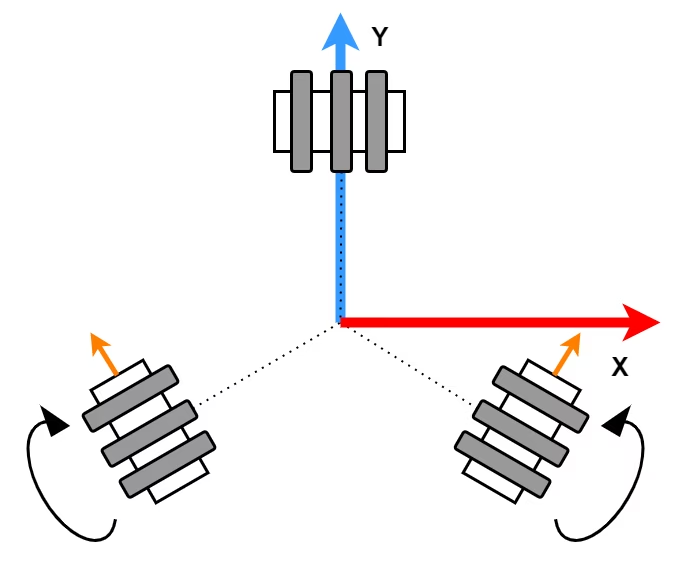
3輪で、前に進みたい場合は以下のようになる 上のホイールは回転させずにキャスターの役割をしている
| 前に進みたい場合 | ベクトル分解 |
|---|---|
 |
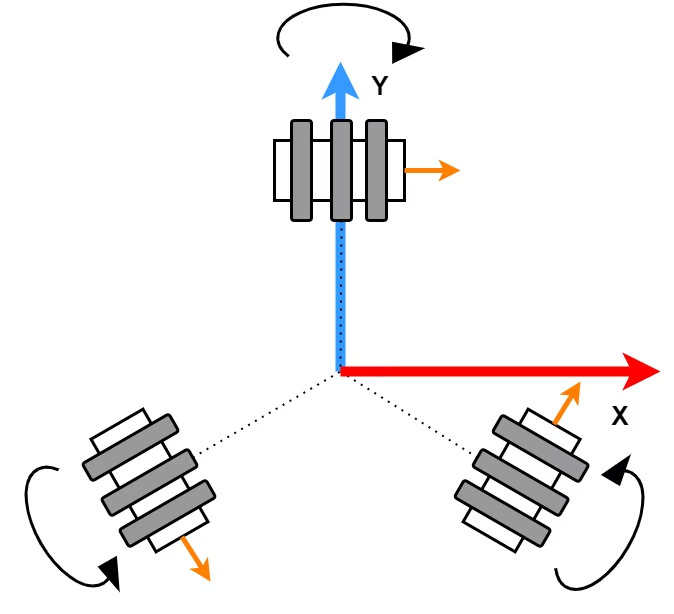
| 右に進みたい場合 | ベクトル分解 |
|---|---|
 |
逆運動学
上の図のようにロボットの移動させたい速度ベクトルに対して、ホイールをどの方向にどれだけ回転させればいいのか を考えるということを逆運動学と呼ぶ 自分で考えるのは面倒なので、有名な阪大の資料を参考にする
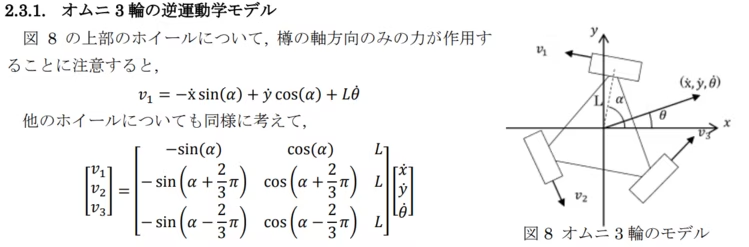
阪大より
このようにいい感じに一般式もヤコビ行列表記もされているので、わかりやすいだろう 実装は上の式を書くだけなので簡単である。
メカナム
メカナムは下の図のようにバレルが斜め45度にまがっちゃった的なタイヤである

概要
ドライブの呼び名もメカナムドライブである この足回りは、オムニと仕組みはほぼ同じであるが、進行方向への速度が出やすいため、速度重視の競技で採用される場合が多い 上下左右のホイールの向きが左右反転していなければならない(ベクトル自体は干渉する必要があるため)ため、基本的に4輪でしか使わないし、配置も決まっている
一見するとどうなっているかわかりにくいかもしれないが、フリーローラーの方向を下から見てみると、4輪オムニと同じであることがわかると思う よって、図の右前と左後のタイヤだけを前に回転させると、オムニのように左前方向へ進む
逆運動学
逆運動学モデルは以下である。 ちょっとオムニより複雑に見えると思うが、これはバレルがホイールの回転方向に対して45度傾いているためである。
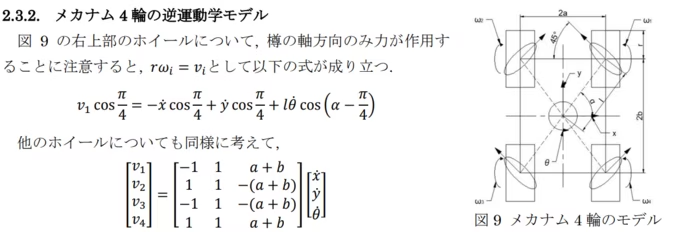
阪大より
ステア
概要
ステアは独立ステアリングとも呼ばれ、全部のタイヤの向きを回転させることで、全方向に移動する機構である 機械的にも制御的にも複雑であるが、理論上最速の足回りであるため、ロマンを求めて作成する場合もある 海外ではSwerve Driveと呼ばれている。
具体例
東大のステア
youtubeより
タイヤは普通のタイヤであるが、摩擦係数の高いものを使用する場合が多い
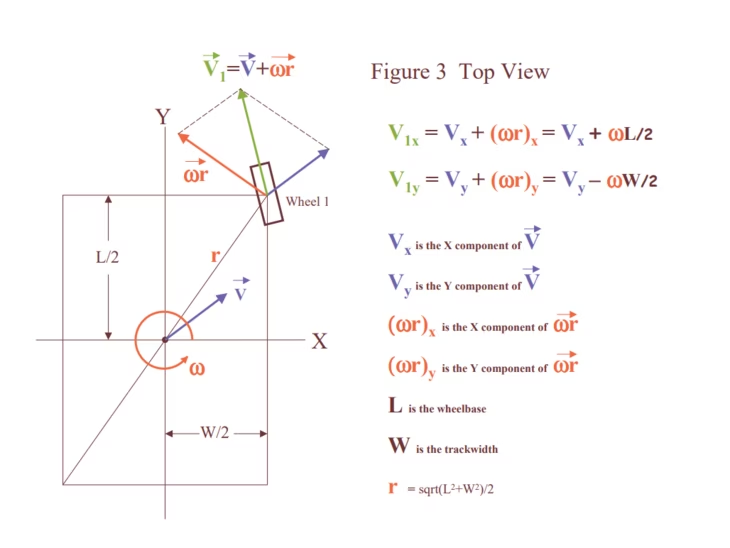
逆運動学
逆運動学だけで言えば、ステアが一番シンプルであるが、阪大の資料が間違っているため、 私が一番わかりやすいと考えている資料をコピペしておく 角度の算出方法が書いていないが、アークタンジェントに図中のV1xとV1yを入れればいいだけである ステアの制御は、操舵をどうやって制御するのかに尽きる
一覧表
| 足回り | タイヤ | モーター数 | メリット | デメリット |
|---|---|---|---|---|
| 対向二輪 | ノーマルタイヤ | 1 | 最小限 | 曲がれない |
| 独立対向二輪 | ノーマルタイヤ | 2 | 直進と旋回ができる | 全方向移動できない |
| ホロノミックドライブ | オムニホイール | 3 or 4 | 全方向移動できる | 高加速度を実現しづらい 高速移動が実現しづらい 直進性が低い |
| メカナムドライブ | メカナムホイール | 4 | 全方向移動できる 高速移動が実現可能 | 高加速度を実現しづらい |
| H-Drive | オムニホイール | 4~ | ||
| 独立操舵 (Swerve Drive) | ノーマルタイヤ | 6 or 8 | 条件付きで全方向移動できる 高加速度かつ高速に移動可能 | 機械も制御も難しい スリップリングにしないと配線が千切れる 重い |
| 独立操舵 (Differencial Swerve or Coaxial Swerve) | ノーマルタイヤ | 6 or 8 | 条件付きで全方向移動できる 高加速度かつ高速に移動可能 配線が千切れない | 機械が大変 トルクが干渉するため制御が死ぬほど大変 重い |
| 独立操舵 (平行移動のみ) | ノーマルタイヤ | 4 or 5 | 全方向移動できない | |
| アクティブキャスタ | ノーマルタイヤ | 6 or 8 | 完全な全方向移動が可能 | 機械がかなり大変 制御が大変 スリップリングにしないと配線が千切れる 重い |
| West Coast Drive | ノーマルタイヤやオムニホイール | 6~ |