Kamikaze-Robot-Project
Kamikaze Robot Projectとは
Kamikaze Robot Projectとは、壁を走るロボットを作成するべく立ち上がったプロジェクトです
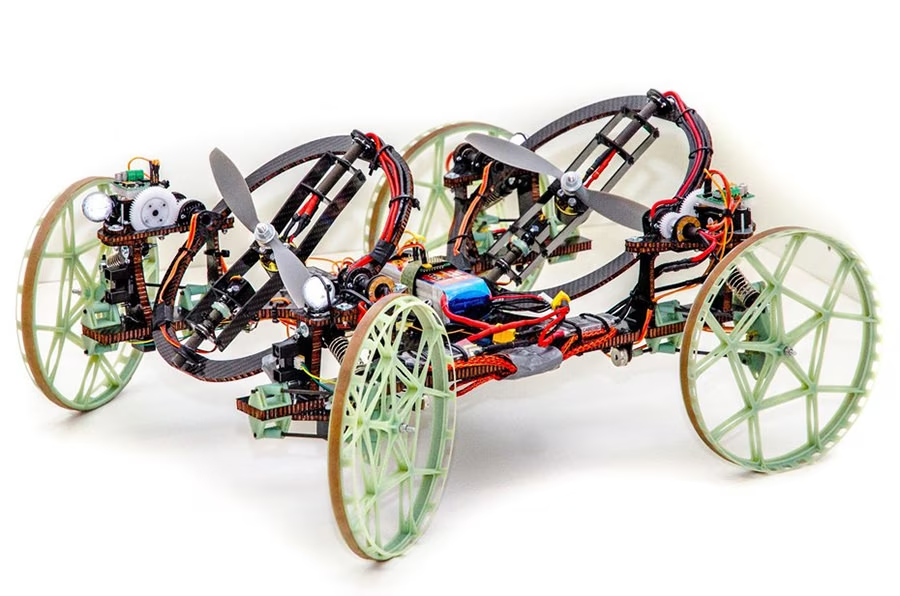
VertiGo
チューリッヒ工科大学とディズニーリサーチの共同制作ロボット「VertiGo」に 魅了された2020年の私は、コロナのチャンスにこれを作ろうと決意し、チームを募集しました
Z-one
Kamikaze Robot Projectではじめに作成するロボットの名前は、Z-oneと名付けられました
高専ロボコン2020
この年は、コロナでなぜかCteamが爆誕しました
どんなロボットをつくるか
まず、どんなロボットを作るか考えました
VertiGoの分析から始めました VertiGoの特徴は、2つのプロペラだけで、移動したり、壁を登ったりするという点です
VertiGoと少し違うものを作りたいと考えて、 駆動用にモーターを搭載することにし、プロペラを一つにすることにしました
制作開始
壁を走るロボットをロボコンに出せる範囲で作成するためには、様々な困難がありました この年は、リポが使えないとかいう意味不明のルールでした
バッテリー選定
リポが使えないことによる問題がありました
- 弱いバッテリー(瞬間的に出せる電流が少ない)だと、ブラシレスを回せない
- あまり重いバッテリーを搭載すると、壁を走れない
そこで、軽量な鉛蓄電池を探す旅へ出ました…
? ? !!! … ? ?!?!?!?!?
GSユアサという会社のバイク用なまちく[PE12V2WS](https://t.co/WcpSSy9f4n)を発見した
モーター選定
次に問題となったのは、モーターの選定でした
今回はプロペラを使うということで、ブラシレスモーターの選定が必要になりました
T-Motorという信頼できる中国の会社のモーターを買いました
モータードライバ選定
また、ブラシレスモータードライバの選定も必要になりました
この界隈で有名な、ODriveを採用しました
問題が発生しました
駆動用に買った、FPV用の小さいモーターは燃えてしまいました
よって、タミヤのラジコン用ブラシレスモーターを買いました
これは強くて良い感じでした
カーボンフレームと3Dプリンタ
機体には、カーボン(CRTP)と3Dプリンタパーツを使用しました
カーボンはAliexpressで発注して作ってもらいました
制御
制御ボードには、Raspberry Pi4を使用しました
サーボの電源はAmazonで買った中華DCDCで賄い、PWMはRaspberry Pi4から直接出力しました
プロペラは、ODriveにUSBで通信して制御しました
足回りは、タミヤのESCにサーボと同じように出力しました
また、コントローラーにはハンドルコントローラーを使用しました
ハンドルコントローラーをUSB経由でPCで処理し、MQTTによってラズパイへと送信する仕組みをとりました
さらに、ラズパイカメラを搭載し、WebRTCを用いてPCに送ることで低遅延な遠隔操縦システムを実現しました
| 制御構成図 |
|---|
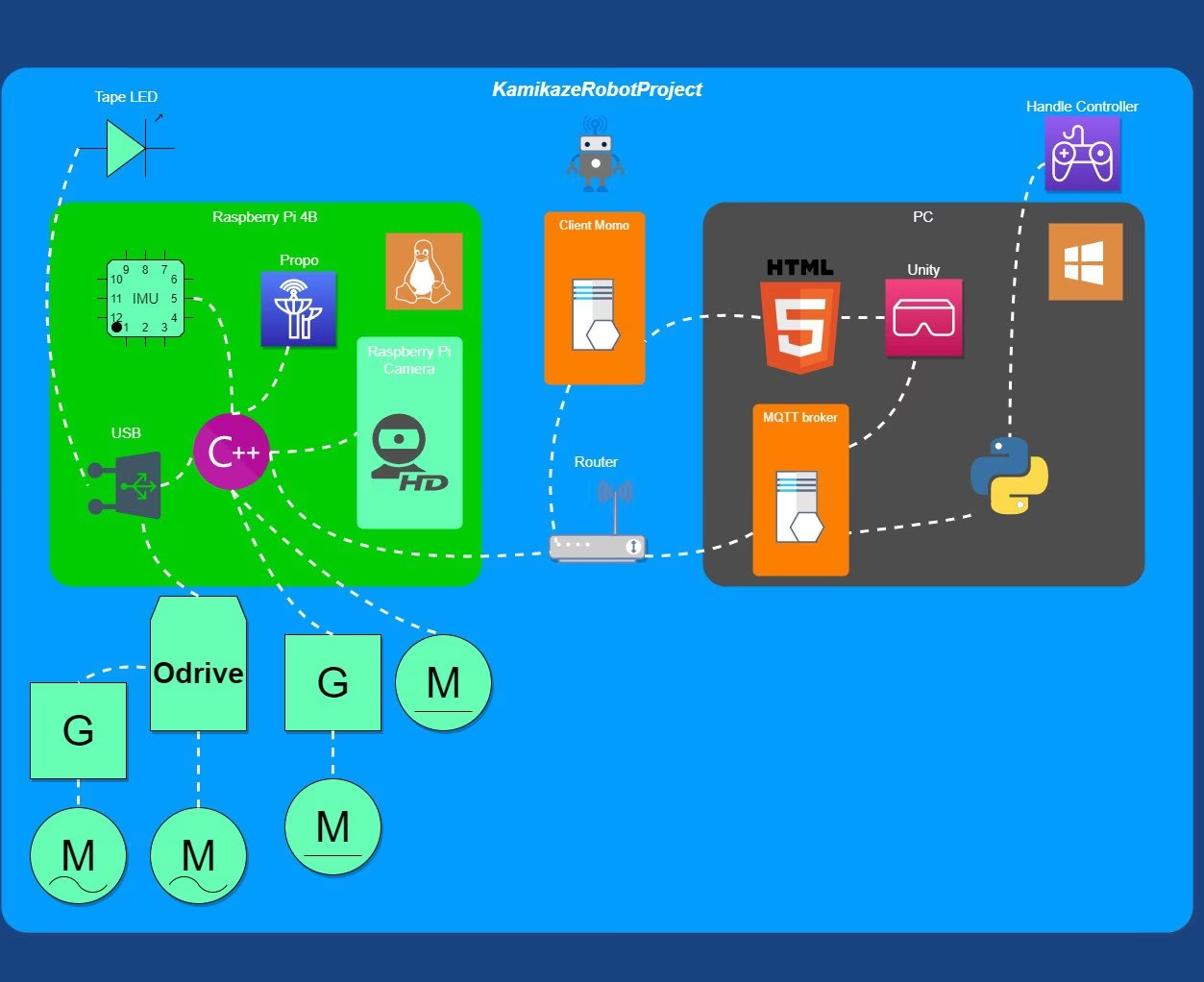 |
完成
完成したZ-one Mk1はこんな感じです
残念ながら壁を走ることはできませんでしたが、床面を走ることは辛うじて数回でき、その後壊れました
| Z-one Mk1 | 大会時の様子 |
|---|---|
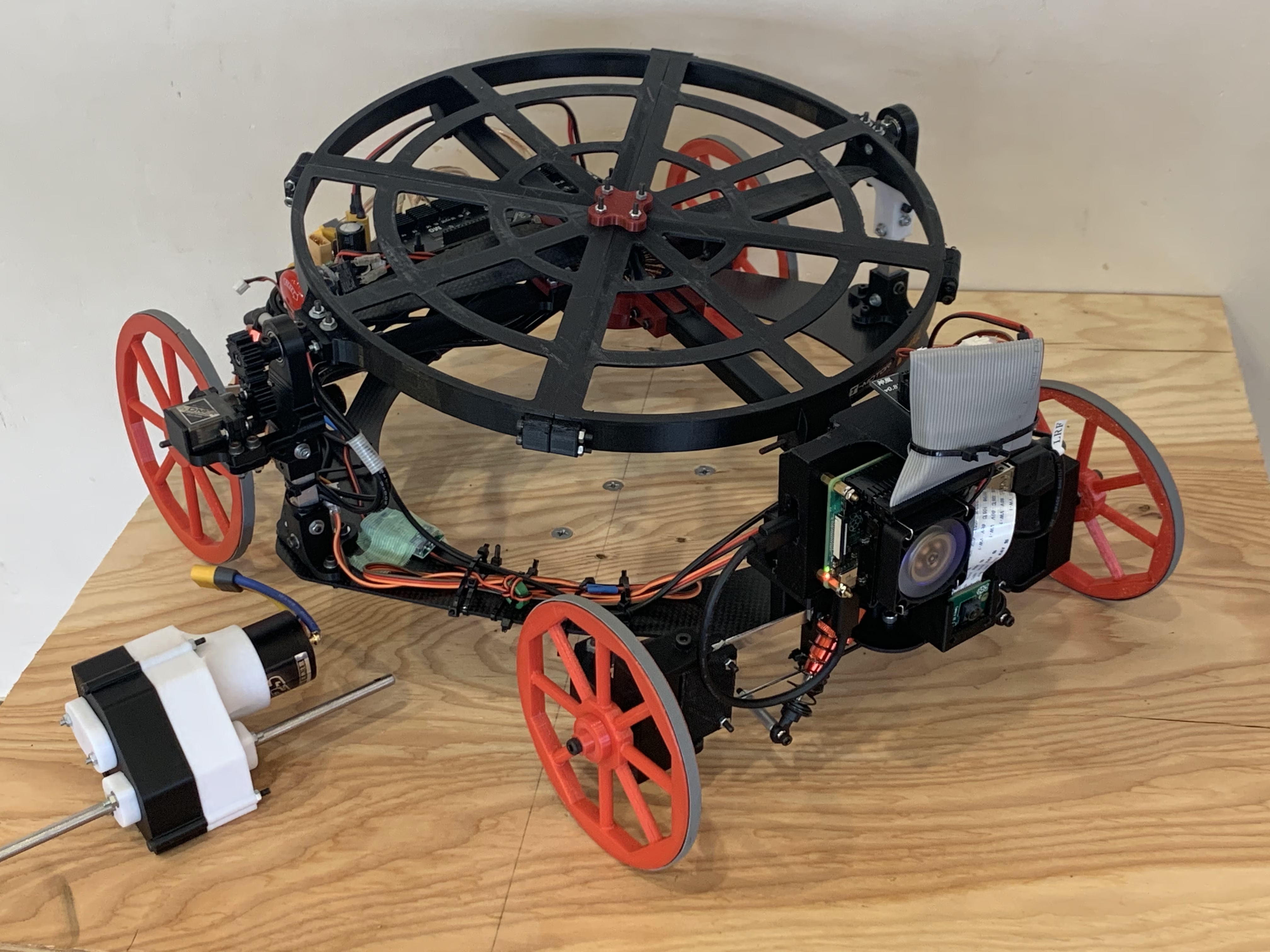 |  |
高専ロボコン2021
昨年に続いてプロジェクトが続行されました
今年はAteamという扱いになりました
反省
昨年の反省をもとに、
- 4WD
- 二重反転プロペラ
- 自作シリコンタイヤ
を採用することにしました
また、今年はリポが搭載可能となって嬉しかったです
制作
今年は、上平が設計と制御の両方を担当しました
マネジメントと回路、加工、フィールドなどはみんなに手伝ってもらって制作しました
今年で一番大変だったのは、軽量化と、4WDかつステアリングするという機構の設計でした
ディファレンシャルギアを採用して、滑らかなカーブを走れるようにしたり、カーボンパイプとディスクカップリングで剛性の高い伝達を実現しました
タイヤは、遊園地で腕に巻くシリコンバンドと3Dプリンタを組み合わせて作成しました
また、二重反転プロペラは、普通にモーターを2つ付けてどうにかしました
個人で完全自作ラジコンを作るのよりも何倍も大変だったと思います
しかし、どうにかなりました
制御
今回は、ODriveとかいう重いブラシレスモータードライバは廃止しました
そもそも、足回りもこれで制御するから搭載していたのであって、プロペラ用でありませんでした
よって、プロペラ用に100A流せるとか書いてある中華のESCを購入し、使用しました
制御ボードには、Raspberry Pi4は重過ぎるとして、Raspberry Pi ZeroWを使用しました
また、ハンドルコントローラーの操縦が面倒という意見により、DualShock4をBluetooth経由で使用することにしました
Raspberry Pi ZeroWに標準搭載されているBluetoothでは、通信が途切れる場合が多かったので、別途Bluetoothアダプタを取り付け、使用しました
完成
途中にZ-one Mk2やMk3があったのだが、これらはごみ過ぎて制作後、破棄しました
完全版はZ-one Mk5です
今回は数秒の間だが、壁を走ることに成功しました
また、地面は余裕で走れる高い走破性を持っていました
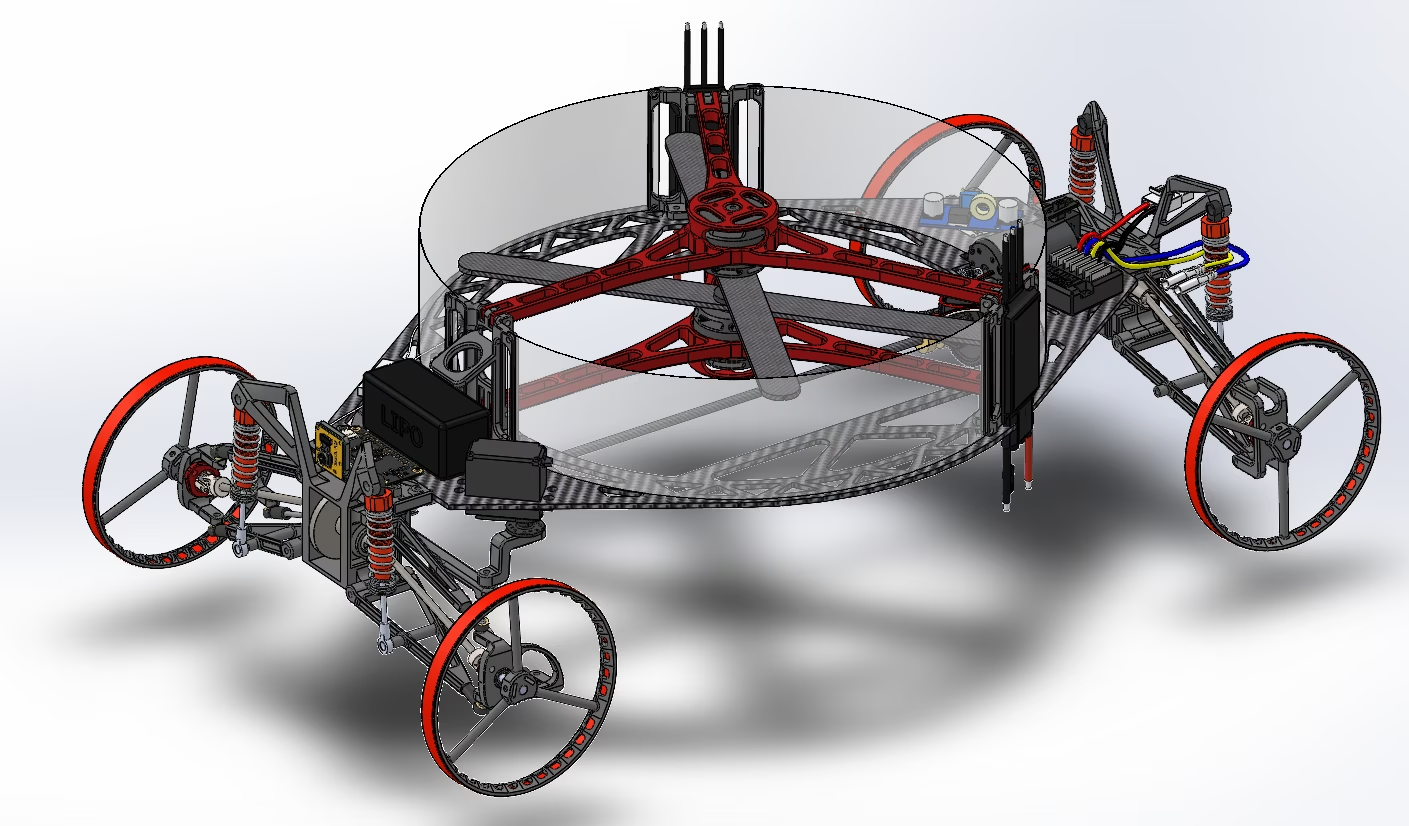
| Z-one Mk5 | 設計 |
|---|---|
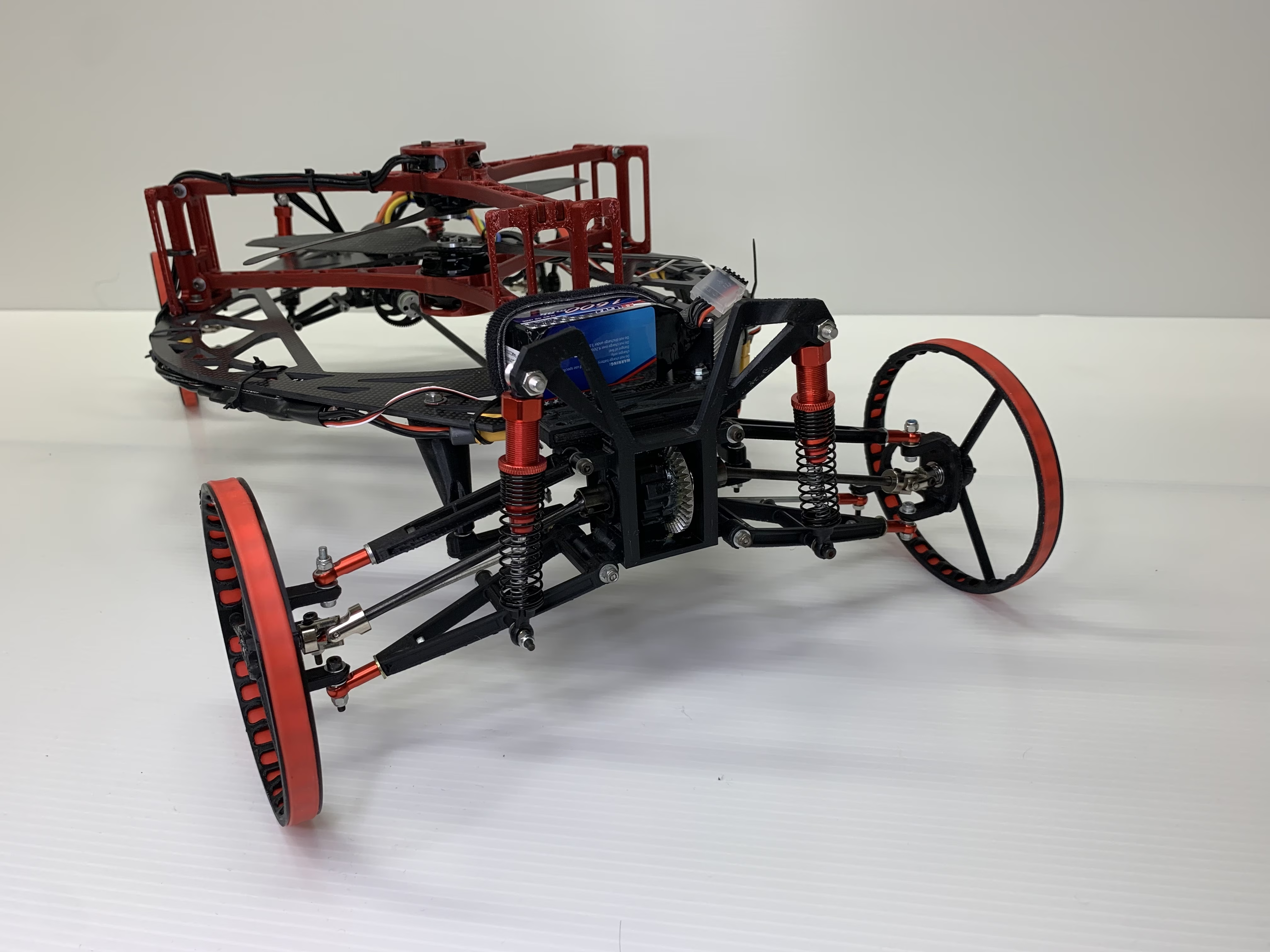 | |